Replicape Rev A

Replicape is a high end 3D-printer electronics package in the form of a Cape that can be placed on a BeagleBone Black. It has five high power stepper motors with cool running MosFets and it has been designed to fit in small spaces without active cooling.
This page is about the hardware. When you have the hardware mounted, take a look a the flow diagram to determine what linux distro and host software you want to use.
{kind=link}
Availability
Replicape is no longer available for sale. See Revolve instead.
Mounting the Replicape on the BeagleBone.
This should be pretty straight forward, just make sure the notch in the cape goes around the Ethernet connector so it makes a.. cape!
How to wire up the board
The below image shows how to wire up the board. Notice that pin 1 and 3 on the thermistor connectors are used. This gives the lowest
noise level from the heater cables which usually runs parallel with the thermistor cables.
Up to ten Dallas 1-wire sensors can be connected on the same bus.
If you want to use hall effect sensors, make sure they can handle 3.3V VCC. BeagleBone does not handle 5V on the inputs and the board might be destroyed by it.
<img src="http://wiki.thing-printer.com/images/Replicape-wire-diagram.svg" width="100%" />
With the board oriented as in the above image, the wires for the steppers are:
A1, A2, B2, B1
This is different from previous designs, but keeps the wires from crossing on the PCB.
{kind=link}
Hardware source files
If you want to extend, build or modify Replicape, for the repository: https://bitbucket.org/intelligentagent/replicape
Replicape Revision A4A
The schematic and layout has been done in Eagle V6.
The changes from Rev A4 are these:
- Re-did the layout so top layer is vertical and bottom is horizontal
- Swapped B1 and B2 on all the steppers so they do not cross in the layout.
Routing and noise
The top layer is mostly vertical traces and the bottom layer is mostly horizontal. Since the board is only two layers, it's important to try to keep with this rule so that both layers can have good ground return. Early designs were troubled by high levels of noise, probably due to insufficient ground return paths, but also due to bad DC-DC converter layout.
Component placement
All components are placed on the top layer to reduce cost of manufacturing. There are two fiducials on the top side to aid in pick and place placement of components.
Board extensions
Revision A4A introduced an extension header for adding more extruders. An extension board would then stack on top of the Replicape. No extension board has been made as of this writing, but the header is kept for future expansions. A total of 3 additional extruders should be possible in addition to three more fans. There is also the MOSI pin from the last serial to parallel converter to enable programming of microstepping etc. for the second board. Look at the schematic to determine the pin-out.
Hardware details
Pins on the BeagleBone used by replicape
Below is a diagram of the pins that have been used on the BeagleBone.
<img src="http://www.thing-printer.com/wp-content/uploads/2013/11/Replicape_pinout_rev_A4-e1384823678555.png" width="100%"/>
{kind=link}
Stepper Motor Controllers
Replicape has 5 stepper motor controllers of the type DRV8825.
These can handle up to 2.5A peak current and 1.75 RMS. They are also very immune to
short circuit and over heating compared to the A4988 which is much used for 3D printer electronics.
High power MOSFETs
There are also 3 high power MOSFETs for controlling two heater cartridges and one hot bed.
The MOSFETs are of the type AON6758 which can handle up to 30V and 32A. The MOSFETs are driven by MOSFET drivers
MCP1402 to ensure they are running cool. For a (somewhat dated) discussion, look here: http://hipstercircuits.com/switching-it-up-using-a-comparator-as-a-level-shifter/ A blue LED is mounted next to each of the MOSFETs to indicate when they are on or off. All mosfets on the board are controlled with a single PWM driver of type PCA9685PW.
Low Power MOSFETs
There are 3 low power MOSFETs of the type NIF5002 that can be used for either fans or LED strips etc. The NIF5002s can handle ~4A each at 12V. There is however a limitation in the DC-DC buck converter (RT8268) of 2A.
Thermistor inputs
There are 3 inputs for NTC thermistors. Each input has a filter to suppress high voltage noise spikes coming from the MOSFETs. There is also a separate pin to ground for shielding the cables of the ADCs. All the thermistor inputs have low pass filters for removing noise so normally, there should not be a need for using a shielded cable, but in particularly noisy environments, it might help. Here is a discussion of the problem: http://hipstercircuits.com/noise-on-the-analog-pins-causes-the-adc-sampler-to-go-out-of-whack/
Power management
There are two voltage converters on the Replicape rev A2. Both are of the type DC-DC buck step down converter. One of the converters is based on MCP16321 and is used to supply the 5V necessary for the BeagleBone to function properly. Below is an image of the 5V startup sequence:
<img src="http://www.thing-printer.com/wp-content/uploads/2014/01/5V-startup.jpg" width="300px">
{kind=link}
On the Rev A3A design, the switching noise on the buck step down regulator can get quite high. If the noise is too high the under voltage protection of the TPS2051 kicks in and disables power on the USB. A quick-fix to this is to add a large value electrolytic capacitor across VDD_5V and ground. Depending on the input voltage (12..24V) anything from 0.1uF up to 1000uF has been tested and worked with 12V input. A somewhat more elaborate, but better approach is to add a ~100R resistor in series with the boost capacitor (C51). This limits the slew rate of the internal N-MOS and lowers the efficiency with approximately 1%. This workaround has been done on the A4 revision.
The 12V step down converter is used to supply 12V to the fans/LED strips.
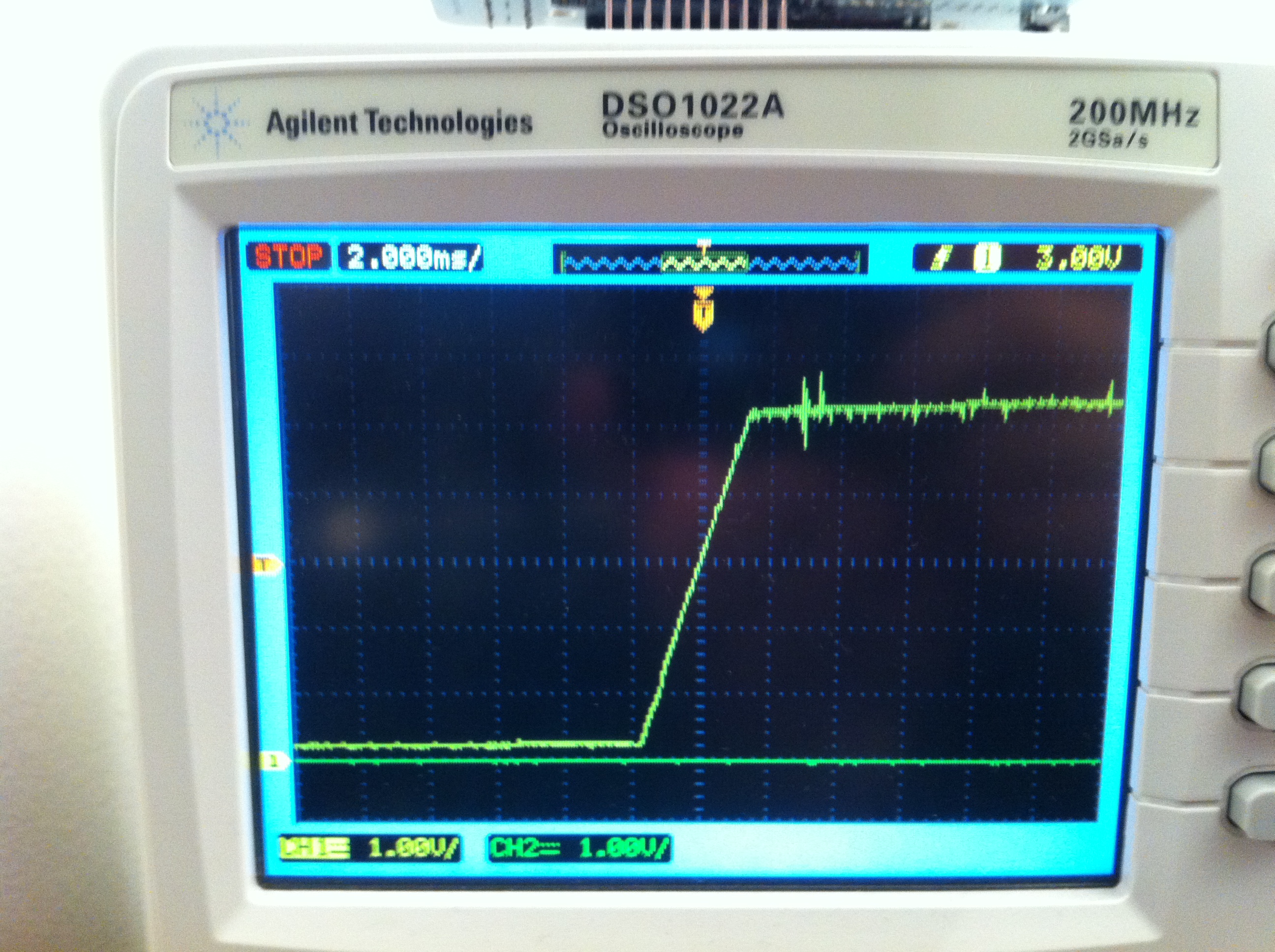
There is thus no need for any additional power sources beyond a single 12..24V power supply. Below is an image of what the
12V startup sequence looks like:
<img src="http://www.thing-printer.com/wp-content/uploads/2014/01/12V-startup.jpg" width="300px">
{kind=link}
LC power spikes
This has reportedly been a problem for some stepper motor drivers that use
low ESR capacitors as decoupeling capacitors. See pololus discussion of the topic: http://www.pololu.com/docs/0J16/all
Replicape has a high quality electrolytic capacitor mounted on the board to remedy this problem.
Here is what the startup looks like. One of the two power pads were probed:
<img src="http://www.thing-printer.com/wp-content/uploads/2014/01/stepper-startup.jpg" width="300px">
{kind=link}
Stepper motor max speed
Todo: measure this.
Power consumption
The following are some sample values for power use with Replicape mounted:
Board booting @24V: 80..130mA
Board running with replicape @24V (5% CPU) 110..120mA
Board booting @12V 110..190mA
Board running with replicape @12V (5% CPU) 150..160mA
MOSFET rise and fall times
Power MOSFET
with a standard 40 W heater element (Hexagon hot end).
rise time: ~60 ns
Fall time: ~250 ns
Troubleshooting
Failed to load slot-0
Depending on which image and kernel you have on your BB, you might see something like this in dmesg:
[ 63.652815] bone-capemgr bone_capemgr.9: loader: failed to load slot-0 BB-BONE-REPLICAP:00A4 (prio 0)
That means there is no device tree overlay for Replicape in /lib/firmware. You can fix this by installing the replicape-devicetree package:
opkg install replicape-devicetree
This should put the right device tree overlay in your /libs/firmware folder. You need to reboot after that.
Update EEPROM
The EEPROM on the Replicape should be updated when it arrives. If not, here are the instructions on how to update it.
Angstrom
If starting from the [Thing image http://wiki.thing-printer.com/index.php?title=Thing], you need to install nodejs:
opkg install nodejs
You also need these files:
wget --no-check-certificate https://bitbucket.org/intelligentagent/replicape/raw/a2b195880014c7c27aabd7c0a8d140c5564007ad/eeprom/replicape_00A4.json wget --no-check-certificate https://bitbucket.org/intelligentagent/replicape/raw/a2b195880014c7c27aabd7c0a8d140c5564007ad/eeprom/eeprom.js wget --no-check-certificate https://bitbucket.org/intelligentagent/replicape/raw/a2b195880014c7c27aabd7c0a8d140c5564007ad/eeprom/bone.js
Then, make the eeprom content:
node ./eeprom.js -w replicape_00A4.json
Finally upload the content to the eeprom:
cat Replicape.eeprom > /sys/bus/i2c/drivers/at24/1-0054/eeprom
Debian
On the Debian/kamikaze image:
sudo apt-get install nodejs-legacy wget https://bitbucket.org/intelligentagent/replicape/raw/f623a0304134b3effcc427a82de1ebbf7cee82bb/eeprom/replicape_0A4A.json wget https://bitbucket.org/intelligentagent/replicape/raw/a2b195880014c7c27aabd7c0a8d140c5564007ad/eeprom/eeprom.js wget https://bitbucket.org/intelligentagent/replicape/raw/a2b195880014c7c27aabd7c0a8d140c5564007ad/eeprom/bone.js node ./eeprom.js -w replicape_0A4A.json cat Replicape.eeprom > /sys/bus/i2c/drivers/at24/2-0054/nvmem/at24-1/nvmem
Please note the address on the I2C bus, it might be 55, 56 or 57 depending on your settings.
Testing Replicape
A script is available for testing the board. This is inteded for manufacturers, but could be useful for end-users as well. To install the test script do the following. Install the test script package:
opkg install replicape-test
Use the "testing" config file for Redeem:
cd /etc/redeem ln -s Testing.cfg printer.cfg
Finally, since the boards to test/flash do not have eeprom when plugged in, it must be enabled through the command line.
mkdir /media/mmc1 mount /dev/mmcblk0p1 /media/mmc1/ echo "optargs=drm.debug=7 capemgr.enable_partno=BB-SGX,BB-BONE-REPLICAP:0A4A consoleblank=0 vt.global_cursor_default=0" > /media/mmc1/uEnv.txt